
Wow, how good is that idea?
As a water-bound beast hoovers up plankton, so this Arduino-based system filters out small bits of plastics in the water where its swimming. For sampling purposes, or maybe even planned removal, and it can it can process down to 2mm particles, apparently. It’s based on an Arduino Nano 33 IoT board, to be precise
It’s the product of the Natural Robotics Contest, organised by researchers, who asked for possible designs for robots inspired by nature, that could help the world. And then they made the winning idea into a working prototype.
The winner for 2022 was in fact ‘Gillbert’, by one Eleanor Mackinstosh – the aforementioned robotic fish that filters microplastics using its gill structures. It was also made open source with a novel 3D printed gill design.
The related work of the researchers – from the University of Surrey, École polytechnique fédérale de Lausanne, Technische Universität München, Queen Mary University of London, and Royal College of Art – can be read here.
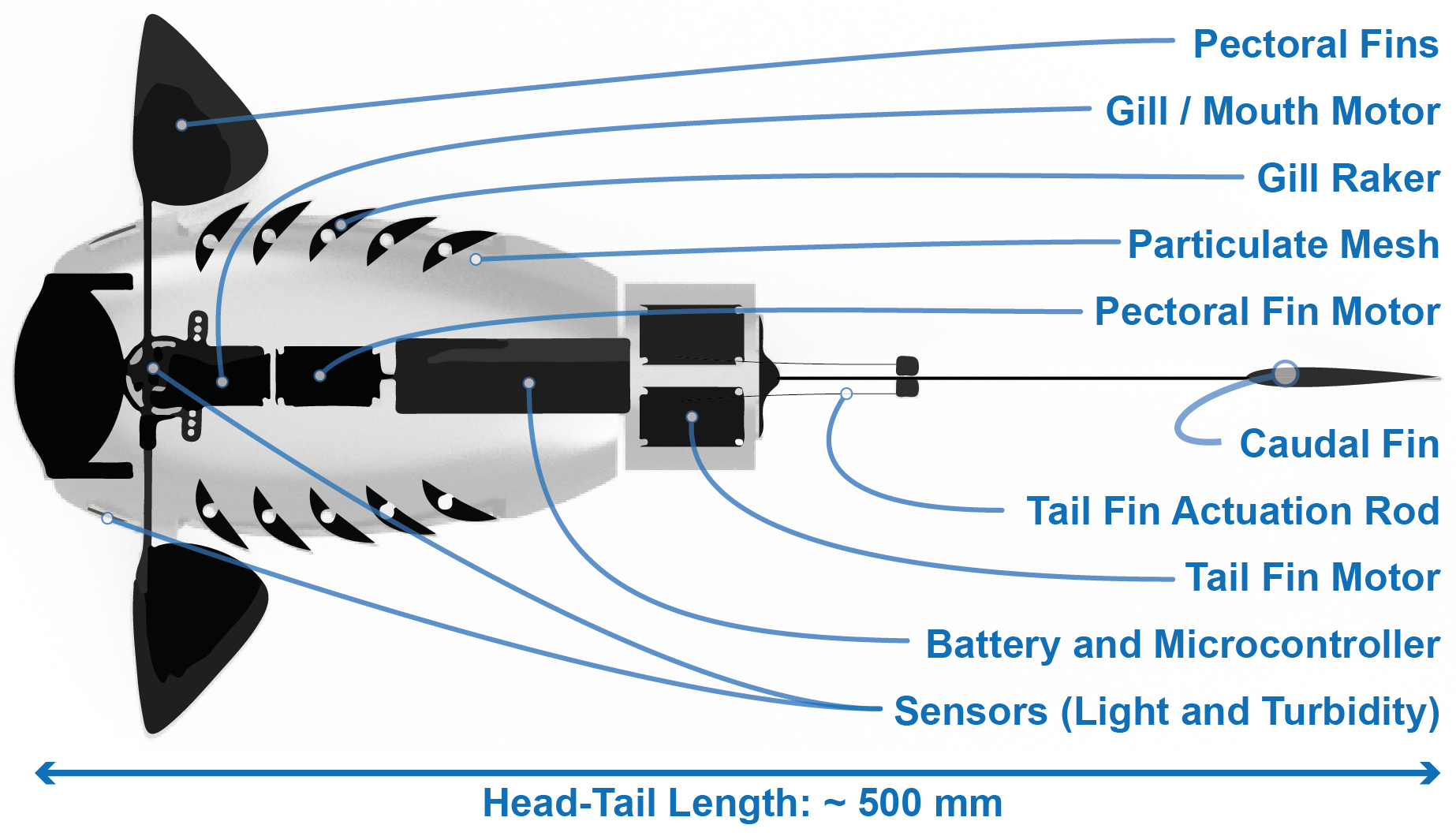
A diagram of the robot, showing the internal mechanics, including location of actuation motors, and the position of gill rakers and mesh for filtering, is below:
The organisers write:
“Eleanor’s design took thoughtful inspiration from nature and had an important purpose – sampling and tracking microplastics in the water.”
“We took her idea and turned it into a fully 3D-printed fish with a set of mesh lined gills, which Eleanor has affectionately named ‘Gillbert’. The robot is now an ongoing piece of robotics research! You can see Eleanor’s idea and the robot it became in the gallery below. If you want more detail on the contest and the robot, you can read our research paper.”
Arduino Nano
The Arduino team, which highlighted this one in its excellent newsletter, writes:
“An Arduino Nano 33 IoT board controls Gillbert’s motors and monitors the sensors, which include a LSM6DS3 IMU (inertial measurement unit), a turbidity sensor, and a light/color sensor. The Arduino receives commands through WiFi via a tethered receiver that floats on the surface. The operator pilots Gillbert using a Microsoft Xbox One controller and power comes from a 5000mAh USB battery bank.”
The only problem for me is that I guess is it hoovers everything up in its mesh. That can’t always be a good thing, surely – some natural elements are good and small… Anyway, watch the video to see more, including the filtering of the ‘gills’ in action.
Congrats to Eleanor. And that lake, by the way, is by Guildford – as the lead researcher Rob Siddall is based at the University of Surrey…
Possible improvements? Rob suggests Gillbert could be made to swim faster, via a more powerful tail, and be a bit smarter, so that instead of being explicitly remote controlled it can operate more independently.
See also: The robotic eel, swimming with sensors






